
LiDAR
MCU는 Nvidia에서 나온 Jetson TK1을 쓰고 있고, Lidar는 Hokuyo ust-10lx (약140만원)
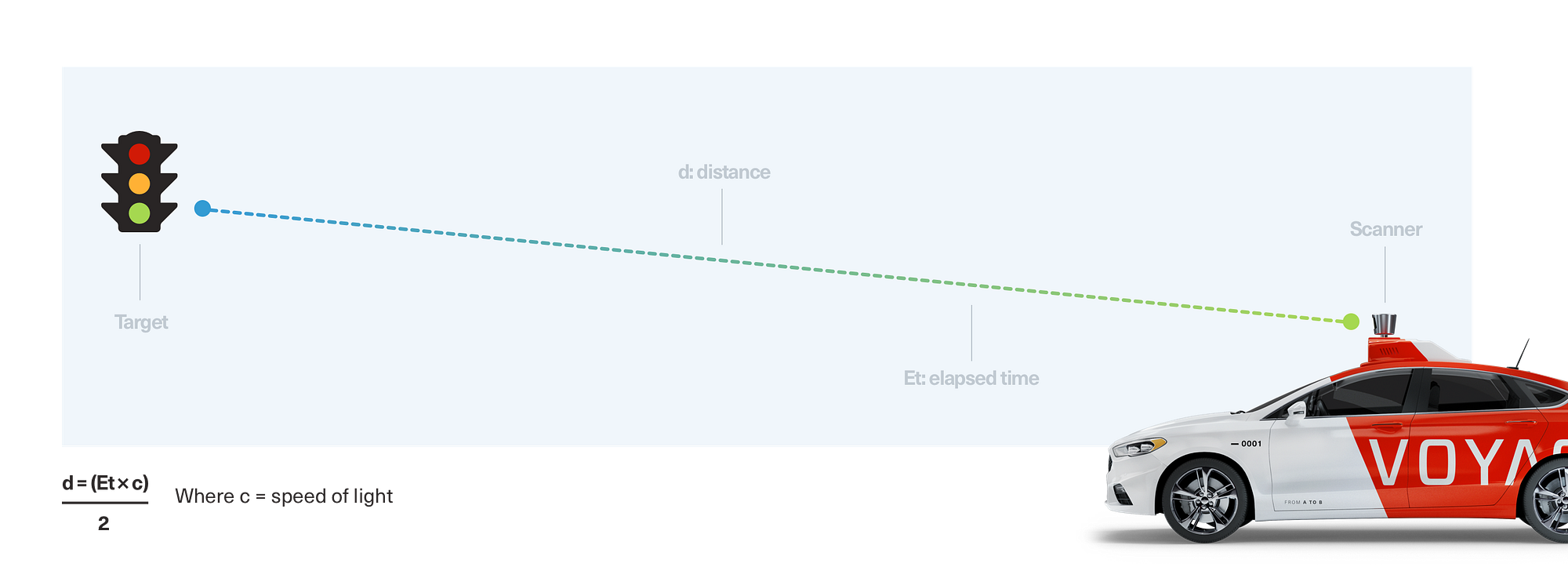
LiDAR sensors : 물체와의 거리측정용 calculating the time taken by a pulse of light to travel to an object and back to the sensor.
LiDAR can provide a 360° 3D view of the obstacles
radar or camera sensors에 비하여 가격이 비싸다.
http://ssan664.tistory.com/716
- 1960년부터 개발 시작, 2007 DARPA Autonomous Driving Challenge이후 차량에 적용
거리 오차 : ±2cm
측정 포인트 : HDL-64 = 64K points/frame
측정 거리 : ~60m(센서 마다 다름~200m)
Startup : sweep, $349.00
제약 :
- LiDAR requires optical filters to remove sensitivity to ambient light and to prevent spoofing from other LiDARs.
- the laser technology used has to be “eye-safe”.
More recently the move has been to replace mechanical scanning LiDAR, that physically rotate the laser and receiver assembly to collect data over an area that spans up to 360° with Solid State LiDAR (SSL) that have no moving parts and are therefore more reliable especially in an automotive environment for long term reliability.
SSLs currently have lower field-of-view (FOV) coverage but their lower cost provides the possibility of using multiple sensors to cover a larger area.
Mobile Laser Scanning(MLS) : eg. VMX450
Rotating Multibeam(RMB) Lidar system : eg. Velodyne HDL-64
Tesla & Google Disagree About LIDAR — Which Is Right? : Lidar를 쓰는게 좋을까 안 쓰는게 좋은까?
Radar (radio direction and ranging)
determine the velocity, range and angle of objects.탐지 뿐만 아니라, 추적도 가능
2차 세계 대전때부터 개발된 기술,radio waves를 이용하여 거리 탐지
Radar doesn’t necessarily give you granularity of LIDAR, but Radar and LIDAR are very complimentary, and it’s definitely not either/or.
다른 센서에 비하여 계산 부하가 작음
거의 모든 환경에 적용 가능, 기상환경이 좋지 않아도 좋은 효과를 보임
RADAR sensors 분류(거리)
- Short Range Radar (SRR) 0.2 to 30m range
- Medium Range Radar (MRR) in the 30-80m range
- Long Range Radar (LRR) 80m to more than 200m range. : ACC, AEBS용으로 사용
제약 사항 : a car cutting in front of your vehicle, detecting thin profile vehicles such as motorcycles being staggered in a lane and setting distance based on the wrong vehicle due to the curvature of the road.
해결 방법 : a radar sensor could be paired with a camera sensor in the vehicle to provide additional context to the detection.
RGB-D

In [Bamji et al., 2015] it is reported that the Kinect v2 can measure depth in the range 0.8-4.2 m with an accuracy of 0.5% of the measured range.
SR 4000 : 0.5~10m
An Overview of Depth Cameras and Range Scanners Based on Time-of-Flight Technologies, 3D Camera Survey
Camera
제약 사항 : adverse weather conditions and variations in lighting.
장점 : texture, color and contrast information을 습득할수 있는 유일한 장비, Classification 수행 가능

Stereo Camera
- DUO M/MLX : 0.23-2.5m,0.1-0.3mm accuracy [출처]
Camera Only Approach company
Tesla
Comma
AutoX.