ROS 실습 (90%)
ROS 기반 Voxelization (PCL-Python)
실습에서는 PCL-Python 기반 Voxelization에서 정의한 do_voxel_grid_downssampling()를 사용하여 수신된 Raw데이터를 복셀화 하여 출력 해보도록 하겠습니다.
기본 구조는 이전챕터에서 살펴본 [ROS 기반 I/O]와 동일 합니다.
#!/usr/bin/env python3
# coding: utf-8
import rospy
from sensor_msgs.msg import PointCloud2
import sensor_msgs.point_cloud2 as pc2
import pcl
import pcl_helper
def do_voxel_grid_downssampling(pcl_data,leaf_size):
'''
Create a VoxelGrid filter object for a input point cloud
:param pcl_data: point cloud data subscriber
:param leaf_size: voxel(or leaf) size
:return: Voxel grid downsampling on point cloud
:https://github.com/fouliex/RoboticPerception
'''
vox = pcl_data.make_voxel_grid_filter()
vox.set_leaf_size(leaf_size, leaf_size, leaf_size) # The bigger the leaf size the less information retained
return vox.filter()
def callback(input_ros_msg):
cloud = pcl_helper.ros_to_pcl(input_ros_msg)
print("Input :", cloud)
# 실행 코드 부분
LEAF_SIZE = 0.1
cloud = do_voxel_grid_downssampling(cloud,LEAF_SIZE)
print("Output :", cloud)
print("")
cloud_new = pcl_helper.pcl_to_ros(cloud) #PCL을 ROS 메시지로 변경
pub.publish(cloud_new)
if __name__ == "__main__":
rospy.init_node('tutorial', anonymous=True)
rospy.Subscriber('/velodyne_points', PointCloud2, callback)
pub = rospy.Publisher("/velodyne_points_new", PointCloud2, queue_size=1)
rospy.spin()
결과값

('Input :', <PointCloud of 18466 points>)
('Output :', <PointCloud of 10131 points>)
('Input :', <PointCloud of 18461 points>)
('Output :', <PointCloud of 10121 points>)
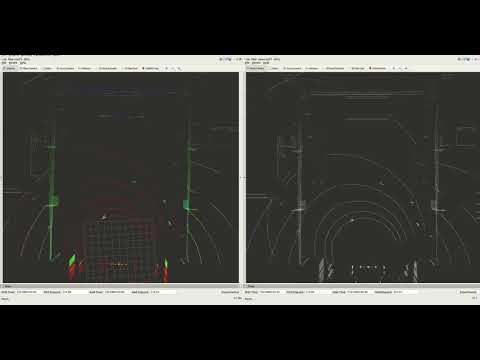
시각적인 차이는 크지 않습니다. 하지만 출력되는 점군의 수는 18,000개에서 10,000개로 다운 샘플링 되어 있는걸 확인 할수 있습니다.
ROS 기반 Voxelization (PCL-Cpp)
실행 확인 되지 않은 코드 입니다. 참고로만 활용 바랍니다.
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
// PCL specific includes
#include <pcl/conversions.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
ros::Publisher pub;
// This is to save on typing
typedef pcl::PointCloud<pcl::PointXYZ> point_cloud_t;
void cloud_cb (const sensor_msgs::PointCloud2& ros_pc)
{
// See http://wiki.ros.org/hydro/Migration for the source of this magic.
pcl::PCLPointCloud2 pcl_pc; // temporary PointCloud2 intermediary
pcl_conversions::toPCL(ros_pc, pcl_pc);
// Convert point cloud to PCL native point cloud
point_cloud_t::Ptr input_ptr(new point_cloud_t());
pcl::fromPCLPointCloud2(pcl_pc, *input_ptr);
// Set up VoxelGrid filter to bin into 10cm grid
pcl::VoxelGrid<pcl::PointXYZ> sor;
sor.setInputCloud(input_ptr);
sor.setLeafSize(0.1, 0.1, 0.1);
// Create output point cloud
point_cloud_t::Ptr output_ptr(new point_cloud_t());
// Run filter
sor.filter(*output_ptr);
// Now covert output back from PCL native type to ROS
sensor_msgs::PointCloud2 ros_output;
pcl::toPCLPointCloud2(*output_ptr, pcl_pc);
pcl_conversions::fromPCL(pcl_pc, ros_output);
// Publish the data
pub.publish(ros_output);
}
int main (int argc, char** argv)
{
// Initialize ROS
ros::init (argc, argv, "pcl_voxel");
ros::NodeHandle nh;
// Create a ROS subscriber for the input point cloud
ros::Subscriber sub = nh.subscribe("/velodyne_points", 1, cloud_cb);
// Create a ROS publisher for the output point cloud
pub = nh.advertise<sensor_msgs::PointCloud2>("/velodyne_points_new", 1);
// Spin
ros::spin ();
}