ROS 실습 (90%)
실습에서는 PCL-Python 기반 노이즈 제거에서 정의한 do_statistical_outlier_filtering()를 사용하여 수신된 Raw데이터에서 노이즈를 제 하여 출력 해보도록 하겠습니다.
파라미터에 따라서 원거리 점군도 노이즈로 인식 하여 제거 될수 있습니다. 기본 구조는 이전챕터에서 살펴본 [ROS 기반 I/O]와 동일 합니다.
#!/usr/bin/env python3
# coding: utf-8
import rospy
from sensor_msgs.msg import PointCloud2
import sensor_msgs.point_cloud2 as pc2
import pcl
import pcl_helper
def do_statistical_outlier_filtering(pcl_data,mean_k,tresh):
'''
:param pcl_data: point could data subscriber
:param mean_k: number of neighboring points to analyze for any given point
:param tresh: Any point with a mean distance larger than global will be considered outlier
:return: Statistical outlier filtered point cloud data
eg) cloud = do_statistical_outlier_filtering(cloud,10,0.001)
: https://github.com/fouliex/RoboticPerception
'''
outlier_filter = pcl_data.make_statistical_outlier_filter()
outlier_filter.set_mean_k(mean_k)
outlier_filter.set_std_dev_mul_thresh(tresh)
return outlier_filter.filter()
def callback(input_ros_msg):
cloud = pcl_helper.ros_to_pcl(input_ros_msg)
print("Input :", cloud, type(cloud))
# 실행 코드 부분
cloud = pcl_helper.XYZRGB_to_XYZ(cloud)
mean_k = 10
tresh = 0.001
cloud = do_statistical_outlier_filtering(cloud,mean_k,tresh)
color = pcl_helper.random_color_gen()
cloud = pcl_helper.XYZ_to_XYZRGB(cloud,color)
print("Output :", cloud, type(cloud))
print("")
cloud_new = pcl_helper.pcl_to_ros(cloud) #PCL을 ROS 메시지로 변경
pub.publish(cloud_new)
if __name__ == "__main__":
rospy.init_node('tutorial', anonymous=True)
rospy.Subscriber('/velodyne_points', PointCloud2, callback)
pub = rospy.Publisher("/velodyne_points_new", PointCloud2, queue_size=1)
rospy.spin()
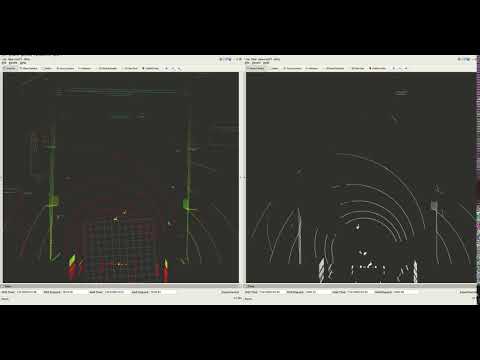
결과
('Input :', <PointCloud of 19042 points>, <type 'pcl._pcl.PointCloud_PointXYZRGB'>)
('Output :', <PointCloud of 12803 points>, <type 'pcl._pcl.PointCloud_PointXYZRGB'>)
('Input :', <PointCloud of 19065 points>, <type 'pcl._pcl.PointCloud_PointXYZRGB'>)
('Output :', <PointCloud of 12840 points>, <type 'pcl._pcl.PointCloud_PointXYZRGB'>)
('Input :', <PointCloud of 19154 points>, <type 'pcl._pcl.PointCloud_PointXYZRGB'>)
('Output :', <PointCloud of 12915 points>, <type 'pcl._pcl.PointCloud_PointXYZRGB'>)