ROS 실습 (90%)
실습에서는 PCL-Python 기반 관심영역 설정에서 정의한 do_passthrough()를 사용하여 수신된 Raw데이터에서 관심영역 설정 하여 출력 해보도록 하겠습니다.
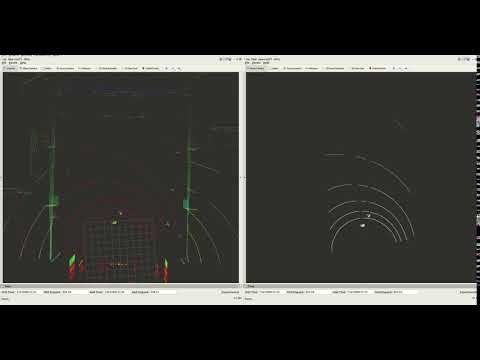
관심 영역은 중앙 로비 부분 이며 상하좌우는 모두 제거 하였습니다. 기본 구조는 이전챕터에서 살펴본 [ROS 기반 I/O]와 동일 합니다.
#!/usr/bin/env python3
# coding: utf-8
import rospy
from sensor_msgs.msg import PointCloud2
import sensor_msgs.point_cloud2 as pc2
import pcl
import pcl_helper
def do_passthrough(pcl_data,filter_axis,axis_min,axis_max):
'''
Create a PassThrough object and assigns a filter axis and range.
:param pcl_data: point could data subscriber
:param filter_axis: filter axis
:param axis_min: Minimum axis to the passthrough filter object
:param axis_max: Maximum axis to the passthrough filter object
:return: passthrough on point cloud
'''
passthrough = pcl_data.make_passthrough_filter()
passthrough.set_filter_field_name(filter_axis)
passthrough.set_filter_limits(axis_min, axis_max)
return passthrough.filter()
def callback(input_ros_msg):
cloud = pcl_helper.ros_to_pcl(input_ros_msg)
# 실행 코드 부분
filter_axis = 'x'
axis_min = 1.0
axis_max = 20.0
cloud = do_passthrough(cloud, filter_axis, axis_min, axis_max)
filter_axis = 'y'
axis_min = -7.0
axis_max = 5.5
cloud = do_passthrough(cloud, filter_axis, axis_min, axis_max)
cloud_new = pcl_helper.pcl_to_ros(cloud) #PCL을 ROS 메시지로 변경
pub.publish(cloud_new)
if __name__ == "__main__":
rospy.init_node('tutorial', anonymous=True)
rospy.Subscriber('velodyne_points', PointCloud2, callback)
pub = rospy.Publisher("/velodyne_points_new", PointCloud2, queue_size=1)
rospy.spin()