Sensor Fusion and Object Tracking using an Extended Kalman Filter Algorithm
An extended Kalman Filter implementation in Python for fusing lidar and radar sensor measurements
An extended Kalman Filter implementation in C++ for fusing lidar and radar sensor measurements : version 1
An extended Kalman Filter implementation in C++ for fusing lidar and radar sensor measurements : version 2
Part 1
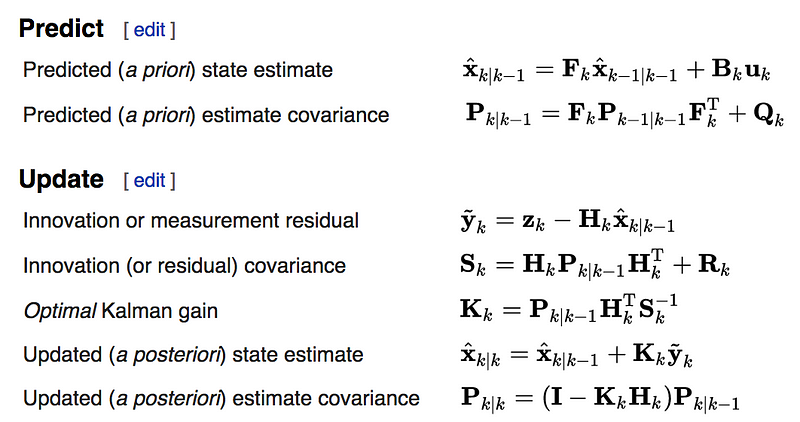
This algorithm is a recursive two-step process:
- prediction step
- produces estimates of the current variables along with their uncertainties.
- These estimates are based on the assumed model of how the estimates change over time.
- The update step is done when the next measurements (subject to noise) is observed.
- In this step, the estimates (let’s call it state from here on) are updated based on the weighted average of the predicted state and the state based on the current measurement.
- A lower weight is given to that with a higher uncertainty.
퓨전 대상
- liar : x,y
- Radar : rho, phi, speed(drho)
가정 : 동일한 속도로 움직인다.
// x - state vector
// P - uncertainty covariance matrix of state x (process covariance)
// z - measurement vector
// R - uncertainty covariance matrix of sensor that produces z (measurement covariance)
// F - update matrix - used to get predicted x - based on time elapsed and assumed dynamic model being tracked
// H - extraction matrix - used to extract the hypothetical measurement if state x is correct and the sensor is perfect
// Q - noise covariance matrix - adds uncertainty to the process covariance
// S - 'innovation' covariance that combines process covariance and measurement covariance
// y - difference between the actual measurement and the predicted measurement
// K - Kalman gain - contains information on how much weight to place on the current prediction and current observed measurement
// - that will result the final fused updated state vector and process covariance matrix
// - computed from P (process covariance), H (extraction), R (measurement covariance)
void KalmanFilter::predict(){
this->x = this->F * this->x;
this->P = this->F * this->P * this->F.transpose() + this->Q;
}
void KalmanFilter::update(
const VectorXd& z, const MatrixXd& H, const VectorXd& Hx, const MatrixXd& R){
const MatrixXd PHt = this->P * H.transpose();
const MatrixXd S = H * PHt + R;
const MatrixXd K = PHt * S.inverse();
VectorXd y = z - Hx;
if (y.size() == 3) y(1) = atan2(sin(y(1)), cos(y(1))); //if radar measurement, normalize angle
this->x = this->x + K * y;
this->P = (this->I - K * H) * this->P;
1.1 predict
A. Estimate of the state X
현 상태
x,y,vx,vy
B. process or state covariance matrix P
- 현 상태의 불확실성
- 현 상태가 n=4이므로 p = nxn = 4x4
- 값(위치) 변화가 크면 불확실성이 높고, 값 변화가 없으면 covariance=0

2.2 Update
A. measurements z
- 측정 정보(Sensor measurement)
B. covariance matrix of these measurements R
- 측정 정보의 불확실성
- R_{lidar} : 측정 정보가 m=2 이므로 2x2
- R_{radar} : 측정정보가 m=3 이므로 3x3
C. update matrix (aka state transition matrix) F
- used to predict the value of the next x and P
- It’s an n x n = 4 x 4 matrix
- need a model of how the system behaves (고정 속도)
I use this model to get the updated x given the elapsed time dt .
``c /* px= px + vx dt py` = py + vy dt vx= vx vy= vy|px
| | 1 0 dt 0 | | px | |py| = | 0 1 0 dt | * | py | |vx| | 0 0 1 0 | | vx | |vy| | 0 0 0 1 | | yz |x` = F x /
void KalmanFilter::updateF(const double dt){ // this->F = MatrixXd::Identity(this->n, this->n); this->F(0, 2) = dt; this->F(1, 3) = dt; }
void KalmanFilter::setQ(const MatrixXd& Qin){ this->Q = Qin; }
#### D. process noise covariance matrix Q
#### E. acceleration noise (ax, ay)
#### F. extraction matrix H
- used to extract the theoretical sensor readings `Hx`
- The extraction matrix has
- m = 2 rows which is the number of **sensor measurements** and
- n = 4 columns which is the number of **state elements**
```python
Hx = H * predicted_x = predicted_z
lidar_px = px = 1 * px + 0 * py + 0 * vx + 0 * vy
lidar_py = py = 0 * px + 1 * py + 0 * vx + 0 * vy
"""
| lidar_px | = | 1 0 0 0 | * | px |
| lidar_py | | 0 1 0 0 | | py |
| vx |
| vy |
lidar_H = | 1 0 0 0 |
| 0 1 0 0 |
"""
위 h는 polar corrd인 radar에 적용 할순 없다. 이 때문에 비선형이고 ex-kalman을 사용한다. Unfortunately, it’s not as straightforward for the radar sensor since it is in polar coordinates. This makes the extraction non-linear (which is why this project is an extended Kalman filter as opposed to a simple Kalman filter).
비 선형성을 선형선으로 하기 위해 Jacobian을 사용하여 H를 estimate한다.
G. Innovation Covariance S
combines the covariance of
- the state P,
- the covariance of the measurements R
- taking into account the extraction matrix H
This seems to be the covariance for vector y which is just the difference between the predicted measurement and actual measurement.
S is factored in to compute the optimal Kalman gain K
Kalman gain K contains information on
- how much weight to place on the current
prediction xand currentobserved measurement z - that will result the final fused updated
state vector xandprocess covariance matrix P.
This K is the weight given to vector y.
The intuition for the Kalman gain K here is that the state is updated based on a weighted average of the predicted state and the state based on the current measurement, a lower weight is given to that with a higher uncertainty.
part 2
ex-kalman은 H, F만 빼고는 기본 칼만과 같다. 본 예시에서는 고정 속도 모델을 사용하였기 때문에 F도 같다. The extended Kalman filter is almost the same as a basic Kalman filter except the H, and F are different. However, in this case, since I‘m assuming a constant velocity model which is linear, the F is the same.

I can’t use a non-linear extraction matrix H for the non-linear radar measurements because the gaussian noise present in the state estimation will not be gaussian anymore which breaks our postulate. So I’d have to estimate a linear extraction matrix H



vector<DataPoint> measurements = get_sensor_measurements_history();
FusionEKF fusionEKF;
for (int i = 0; i < measurements.size(); ++i){
fusionEKF.process(measurements[i]);
cout << " timestamp: " << measurements[i].get_timestamp()
<< " state: " << fusionEKF.get() << endl;
}
In essence, I want to take any sensor measurement (be it from a lidar or radar) and output a state estimate.
First, I’d have to instantiate a FusionEKF object.
FusionEKF::FusionEKF(){
this->initialized = false;
this->lidar_R = MatrixXd(this->lidar_n, this->lidar_n);
this->radar_R = MatrixXd(this->radar_n, this->radar_n);
this->lidar_H = MatrixXd(this->lidar_n, this->n);
this->P = MatrixXd(this->n, this->n);
this->F = MatrixXd::Identity(this->n, this->n);
this->Q = MatrixXd::Zero(this->n, this->n);
this->lidar_R << 0.0225, 0.0,
0.0, 0.0225;
this->radar_R << 0.09, 0.0, 0.0,
0.0, 0.0009, 0,
0.0, 0.0, 0.09;
this->lidar_H << 1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0;
this->P << 1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1000.0, 0.0,
0.0, 0.0, 0.0, 1000.0;
}
void FusionEKF::start(const DataPoint& data){
this->timestamp = data.get_timestamp();
VectorXd x = data.get_state();
this->KF.start(this->n, x, this->P, this->F, this->Q);
this->initialized = true;
}
void FusionEKF::process(const DataPoint& data){
this->initialized ? this->compute(data) : this->start(data);
}
초기화
I have initialized F and lidar_H based on what was discussed in part 1
P is an initial guess of the state covariance
- I initialized the covariances of the velocity components to be quite high
- which means I have no idea at all how it’s going to move
Moving on, FusionEKF::process(DataPoint& data) is also pretty straight forward
센서 정보 수신시
kalmanFilter kf오브젝트 초기화If I am receiving the first sensor measurement, I’ll be initializing theKalmanFilter KF objectThe DataPoint class takes care of converting the measurement to a “state” format.
첫번째 메시지가 아니면
If this isn’t the first sensor measurement I’ve received- then I’ll be computing for the most updated state x and state covariance P based on this sensor measurement.
2.1 compute()
There’s a lot more going on in this compute() function. Computing the state x, as stated many times before, consists of a prediction step followed by an update step.
void FusionEKF::compute(const DataPoint& data){
/**************************************************************************
* PREDICTION STEP
**************************************************************************/
const double dt = (data.get_timestamp() - this->timestamp) / 1.e6;
this->timestamp = data.get_timestamp();
this->updateQ(dt);
this->KF.updateF(dt);
this->KF.predict();
/**************************************************************************
* UPDATE STEP
**************************************************************************/
const VectorXd z = data.get();
const VectorXd x = this->KF.get();
VectorXd Hx;
MatrixXd R;
MatrixXd H;
if (data.get_type() == DataPointType::RADAR){
VectorXd s = data.get_state();
H = calculate_jacobian(s);
Hx = convert_cartesian_to_polar(x);
R = this->radar_R;
} else if (data.get_type() == DataPointType::LIDAR){
H = this->lidar_H;
Hx = this->lidar_H * x;
R = this->lidar_R;
}
this->KF.update(z, H, Hx, R);
}
2.2 Prediction step
시간 경과(dt)를 기반으로 현재의 Q와 F를 계산하여 kalman 필터 prediction()함수에서 사용한다. In the prediction step, I get the elapse time dt and use that to compute for the current Q and F that’s used in this Kalman Filter’s predict() function.
Q는 아래 공식으로 구한다
The Q is based on the formula below which you can see the derivation here.[상세]ax와 ay는 경험에 위해 설정 된다.
The value of the variances sigma_squared_ax, sigma_squared_ay (on the code it’s ax, ay for brevity) are based on experimentation.
Here in this step, trivial to say, I also update the current timestamp.

2.3 Update step
업데이트 파라미터는 센서 데이터의 출처(lidar OR radar)에 따라 다르다. The update parameters for this Kalman Filter is based on where the sensor data is from a lidar or radar.
Hx is just the predicted measurement if the predicted state x we’re correct.
A. Lidar
The lidar has been discussed in Part 1
B. Radar
레이터는 H를 선형화 하여야 한다. For the radar, I’d have to linearize the extraction matrix H as mentioned several times before.
선형화를 위한 계산법 To linearize,
- I compute what is called a Jacobian matrix
- this is based on first-order partial derivatives of the function that converts cartesian to polar.
The value of this Jacobian is based on what the state is if the radar sensor measurement is correct.

Apparently, that’s how simple implementing an extended Kalman Filter is for this particular case. :P