rqt_multiplot
- rqt 플러그인화 가능
- scatter차트 작성 가능 (x,y좌표 시각화)
1. 설치법
sudo apt-get install ros-kinetic-rqt-multiplot
설치가 좀 복잡하니 melodic 사용자는 kinetic버젼 docker사용 추천
2. 사용법
사용법 : https://youtu.be/0xRofmn5iYw?t=456
## float64_Array
from std_msgs.msg import Float32MultiArray
from std_msgs.msg import MultiArrayDimension
def rqt_plot(tracker_input):
msg = Float32MultiArray()
"""
msg.layout.dim.append(MultiArrayDimension())
msg.layout.dim.append(MultiArrayDimension())
msg.layout.dim[0].label = "height"
msg.layout.dim[1].label = "width"
msg.layout.dim[0].size = 3
msg.layout.dim[1].size = 3
msg.layout.dim[0].stride = 3*3
msg.layout.dim[1].stride = 3
msg.layout.data_offset = 0
"""
msg.data = [0]*9
msg.data[0] = tracker_input[0]
msg.data[1] = tracker_input[1]
return msg
msg = rqt_plot(tracker_table)
pub = rospy.Publisher('sent_matrix', Float32MultiArray, queue_size=1)
pub.publish(msg)
## float64
from std_msgs.msg import Float64
pub = rospy.Publisher('cos', Float64)
msg = Float64()
msg.data = math.cos(4*time.time())
pub.publish(msg)
plotjuggler
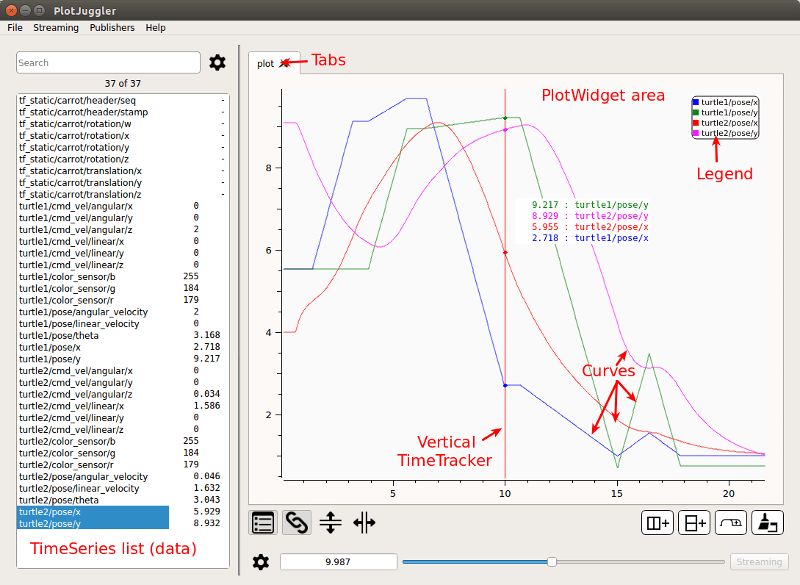
최근 버젼에서 ROS Topic 지원
설치 : sudo apt-get install ros-kinetic-plotjuggler
# melodic 버
sudo apt-get install qtbase5-dev libqt5svg5-dev ros-melodic-ros-type-introspection
cd ~/catkin_ws/src
git clone https://github.com/facontidavide/PlotJuggler.git
cd ..
catkin_make
source devel/setup.bash
# $rosrun plotjuggler PlotJuggler
실행
- rosrun plotjuggler PlotJuggler
- Go to streaming and start ros_topic_streaming
- simply select your topics you wanna stream